떨어뜨리지 않고 더 잘 잡는 그리퍼의 등장?
특허 번호 10-2024-0033250
공기 흡입 방식과 외부 요소의 내부 유입을 차단할 수 있는 그리퍼 장치
적용분야
기술 개요
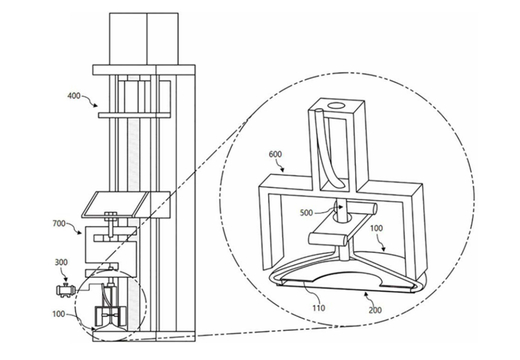
• 그리퍼 장치는 인간의 손가락 구조의 로봇 팔을 이용하여 대상물을
잡고 이송시키거나, 대상물에 접촉된 상태에서 공기를 흡입하여 음압을
발생시키는 방식으로 잡고 이송시키는 역할을 함
• 본 발명의 그리퍼 장치는 목표 대상물의 표면과 접촉시키기 위해
대상물 표면의 수직 방향에 반대되는 방향으로 예압을 걸어
대상물 표면과 맞닿은 상태에서 펌프부를 통해 본체부 내부를
진공 상태로 만듦
대표 Diagram
Keywords
- 기계
종래기술
• 폐쇄구조를 형성하여 물 등과 같은 외부 요소의 내부 유입을
차단하기 어려움(소재 선택의 한계)
• 음압 발생 및 수분 등의 외부 요인에도 안정성 확보 필요
대상기술
• 본 발명의 그리퍼 장치는 주변에서 구하기 쉬운 재질의
사용을 통해 투자 금액 대비 높은 성능 기대
• 간단한 구조로 인한 대량 생산 가능
종래 기술의 한계
• 대상물과 접촉하는 흡착패드의 하부가 개방된 구조로 패드내부,
특히 공기 흡입관이나 펌프 등으로 외부의 이물질이 유입되어
고장의 원인이 됨
• 수중과 같은 외부의 영향이 있는 환경에서는 사용이 어려움
대상기술의 경쟁력
• 초탄성 재료들 중 탄성 계수가 낮은 재료를 사용하여 기존 진공 흡입
컵의 몸체 재료에 비해 유연한 특성으로 더 다양한 형상의 대상물에
적용 가능함
• 유연한 층 재료를 사용하여 그리퍼 장치와 목표 대상물 간의 적응력
감소를 최소화함과 동시에 파지동작을 수행할 때 기존 흡입 컵
대비 강한 접착력을 제공
연구자 정보
부산대학교 기계공학부 손동훈 교수
지식재산권 현황
| 발명의 명칭 | 출원(등록)번호 | 출원(등록)일자 |
| 그리퍼 장치 | 10-2024-0033250 | 2024. 3. 8. |
기술문의
부산대학교 산학협력단 기술사업부 윤재철
관련 컨텐츠


.jpg)